La nuova biblioteca che avanza
Il mondo di Arianna
Come nasce il progetto del robot da biblioteca
Arianna è un robot che è in grado di muoversi su una superficie piana e di andare dove gli viene richiesto, vive in biblioteca e il suo compito è accompagnarci esattamente al libro prescelto. Questo è l’obiettivo del progetto messo in campo dai ragazzi di StuffCube, un gruppo di amici attivi nella provincia di Milano con il pallino del fai-da-te. Una mezza dozzina di makers con competenze estremamente varie nella tecnologia e nell’elettronica che nel tempo libero pensano, fanno, imparano e creano. Tutto a impatto zero, utilizzando materiale riciclato e prontamente disponibile in house.
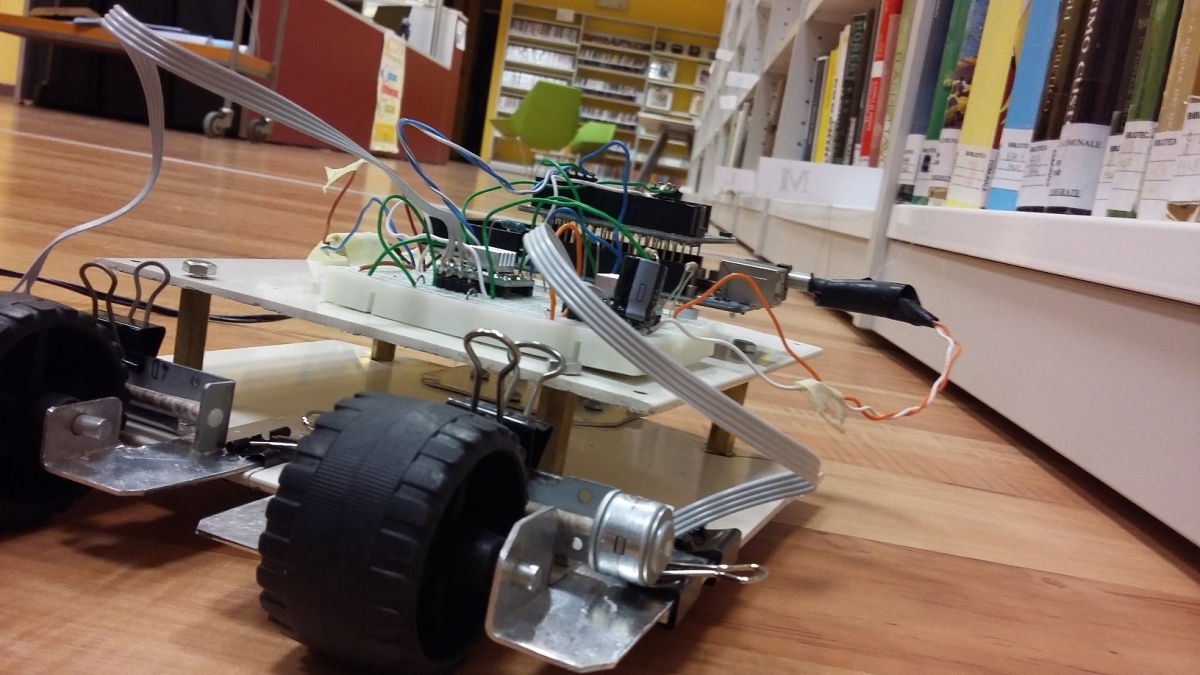
Per muoversi, i prototipi di Arianna stanno sperimentando diverse soluzioni. Tutti hanno due ruote motrici posteriori, mentre davanti hanno uno sterzo o un appoggio libero di ruotare. Il controllo regola la velocità e la direzione. Le parti dei prototipi zero possono provenire da giocattoli, da lamiera di allumino tagliata e piegata oppure essere appositamente stampati in 3D o acquistati. Mollette, viti e distanziali permettono di assemblare il tutto.
L’idea di Arianna nasce in biblioteca per la biblioteca. I primi prototipi attualmente in lavorazione mettono a confronto e in sperimentazione diverse tecniche e tecnologie. Le peculiarità del robottino sono ben precise. La sua presenza deve essere il più discreta possibile, che si traduce nella necessità di avere un’unica sorgente di alimentazione presso la propria base e di essere completamente autonoma negli spostamenti senza l’ausilio di elementi esterni dislocati su pavimenti e arredi.
La percezione di Arianna dell’ambiente circostante è molto diversa dalla nostra: è dovuta unicamente ai sensori e le sue scelte sono frutto di quello che viene scritto nel software. I prototipi utilizzano sensori di diverso tipo (ultrasuoni, infrarossi, di contatto, bussola etc) per orientarsi nello spazio, in triangolazione con un sistema di navigazione indoor che permetta di visualizzare la posizione di Arianna e tracciare il percorso più breve per raggiungere la destinazione prescelta. Il procedimento di mappatura degli spazi dovrà essere costantemente aggiornato interfacciandosi con il sistema di gestione dei materiali della biblioteca.
Così come per la componente meccanica, anche il software verrà sviluppato in più versioni nei diversi prototipi utilizzando anche elementi di uso comune come potrebbe essere uno smartphone per agire sugli spostamenti di Arianna e tradurre la sua posizione fisica, il punto di destinazione e altri elementi in un linguaggio comprensibile da un robot.